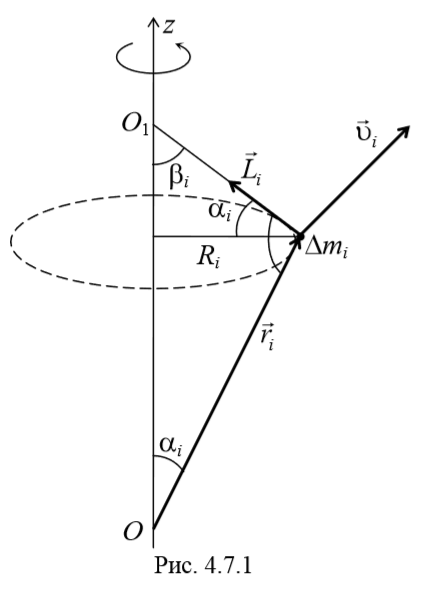
Рассмотрим вращательное движение твердого тела относительно неподвижной оси Oz. Так как твердое тело можно представить как совокупность материальных точек, то воспользуемся основным уравнением динамики вращательного движения относительно точки (4.3.8).
Формула 4.7.1
Найдем проекции правой и левой части уравнения (4.7.1) на ось Oz:
Формула 4.7.2
Формула 4.7.3
Вектор L перпендикулярен радиус-вектору и образует с осью и образует с осью Oz угол βI = 90° − αI. Поэтому проекция момента импульса материальной точки равна

Формула 4.7.4
Подставим правую часть уравнения (4.7.4) в (4.7.3)
Формула 4.7.5
Используя $${\sum^n}$$miR2i=Iz, получим момент импульса твердого тела относительно неподвижной оси Oz
Формула 4.7.6
Подставляя (4.7.6) в выражение (4.7.1)
Формула 4.7.7
и учитывая, что $$ dω \over dt$$=ε, получим основное уравнение динамики вращательного движения относительно неподвижной оси
Формула 4.7.8
Угловое ускорение при вращении твердого тела относительно неподвижной оси прямо пропорционально результирующему моменту внешних сил относительно этой оси и обратно пропорционально моменту инерции тела относительно этой же оси.
Физический смысл момента инерции можно определить из выражения (4.7.8). Если сравнить с основным уравнением динамики поступательного движения (2.1.2), то можно увидеть что роль массы при вращательном движении выполняет момент инерции. Момент инерции тела является мерой инерции тела при вращательном движении.
Если проекция моментов внешних сил относительно оси Oz равна нулю (например, система замкнута) $${M_{z}^e}$$=0, то получаем закон сохранения проекции момента импульса

Формула 4.7.9
Если проекцию моментов внешних сил относительно оси z равна нулю, то момент импульса тела относительно этой оси с течением времени не будет изменяться.
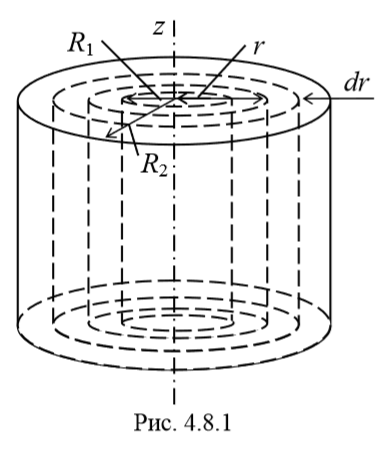
1) Момент инерции однородного полого цилиндра.
Определим момент инерции однородного полого цилиндра, внешний радиус которого R2, а внутренний радиус R1, относительно оси симметрии. Разобьем цилиндр на концентрические цилиндрические кольца толщиной dr. Все кольца находятся на одинаковом расстоянии от оси, равном r. Если плотность вещества постоянна, то элементарная масса dm=ρdV, где dV − объем бесконечно тонкого кольца радиусом r, толщиной dr и высотой h. Поскольку dV=(2πr)hdr, то dm=2πρrhdr.
Таким образом, момент инерции получается посредством интегрирования по всем кольцам:
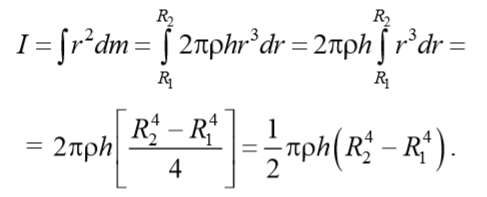
Поскольку (R42-R21)(R22+R21), то момент инерции равен
Объем полого цилиндра V=Sh=πh(R22-R21), тогда его масса m=ρV=πρh(R22-R21).
Таким образом, момент инерции полого цилиндра
Формула 4.8.1
2) Момент инерции тонкостенного цилиндра (обода). Используя формулу (4.8.1) и учитывая, что R1=R2=R, получим
Формула 4.8.2
3) Момент инерции однородного сплошного цилиндра (диска). Используя формулу (4.8.1) и учитывая, что в этом случае R1=0 и R2=R, то момент инерции
Формула 4.8.3
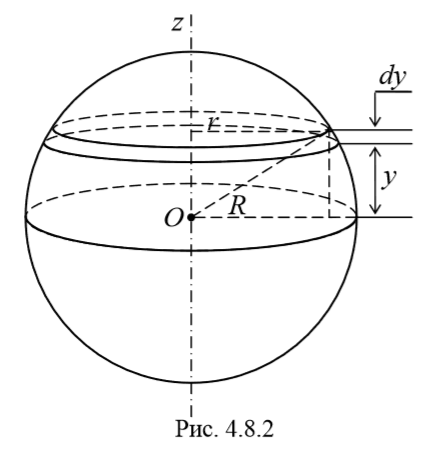
4) Момент инерции однородного шара. Определим момент инерции однородного твердого шара радиусом R, относительно оси, проходящей через его центр. Разобьем шар на бесконечно малые цилиндры высотой dy. Каждый такой цилиндр имеет радиус $${r = \sqrt{R^2-y^2}}$$. Тогда массу бесконечно малого цилиндра можем определить как
Следовательно, момент инерции любого бесконечно малого цилиндра можно записать в виде:
Интегрируя по всем бесконечно малым цилиндрам, получим:
Поскольку объем шара равен V=$$4\over3$$πR3, то его масса m=ρV=$$4\over3$$πρR3.
Таким образом, момент инерции шара будет равен
Формула 4.8.4
5) Момент инерции однородного стержня. Момент инерции стержня длиной l относительно оси проходящей через середину стержня перпендикулярно его длине:
Формула 4.8.5
Рассмотрим вращение твердого тела вокруг неподвижной оси. Линейная скорость элементарной массы mi равна υi=ωRi, где Ri − расстояние от элементарной массы до оси вращения. Кинетическая энергия этой элементарной массы получается выражением
Формула 4.9.1
Кинетическая энергия тела складывается из кинетических энергий его частей, т. е.

Формула 4.9.2
Так как величина $${\sum_{i=1}^n}$$miR2i=I − есть момент инерции тела относительно оси вращения, то кинетическая энергия тела, вращающегося вокруг неподвижной оси
Формула 4.9.3
Рассмотрим плоское движение тела, которое может быть представлено как наложение двух движений − поступательного с некоторой скоростью υo и вращательное вокруг соответствующей оси с угловой скоростью ω.
Кинетическая энергия тела при плоском движении слагается из энергии поступательного движения со скоростью, равной скорости центра масс, и энергии вращения вокруг оси, проходящей через центр масс тела, т. е.
Формула 4.9.4
Работа, совершаемая всеми приложенными к телу силами, идет на изменение его кинетической энергии:
Формула 4.10.1
Подставим в последнее выражение уравнение (4.9.3) и продифференцируем

Формула 4.10.2
учитывая, что $$dω \over dt$$=ε и ωdt=Mzdφ, получим
Формула 4.10.3
Тогда элементарная работа, совершаемая силами, приложенными к телу
Формула 4.10.4
и полная работа при повороте тела на угол φ за время t
Формула 4.10.4