Момент импульса lO материальной точки М относительно точки О рассчитывается по формуле, которая аналогична моменту силы F относительно центра О см.лаб.раб.№6, т. е.

Формула 8.1
где h – плечо импульса p = mυ относительно точки О.
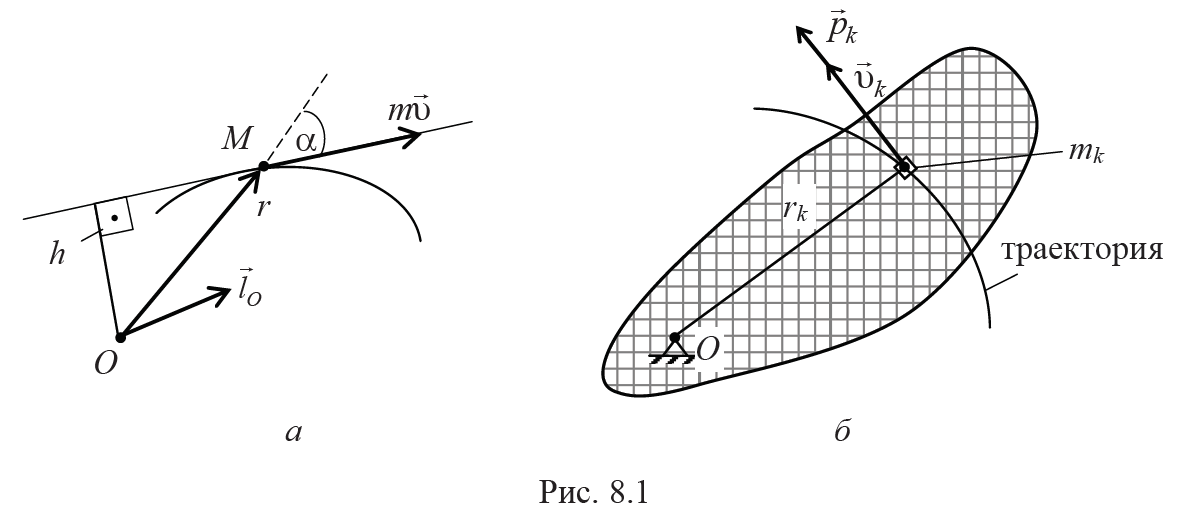
Направление вектора lO определяется по правилу векторного произведения двух векторов, т. е., например, по правилу правой руки. Для векторов, изображенных на рис. 8.1, а момент импульса lO направлен перпендикулярно плоскости рисунка «от нас».
Если тело вращается с угловой скоростью ω вокруг неподвижной оси Oz рис.8.1,б, которая перпендикулярна рисунку, то все его частицы массами mk движутся по окружностям с радиусами rk. Их линейная скорость υk = ωrk, а модуль импульса рk = mkυk = mkrkω.
Модуль момента импульса тела относительно оси Oz равен сумме моментов импульсов всех частиц тела свойствоаддитивности:

Формула 8.2
где hk – плечо импульса pk относительно оси Oz; Iz=N∑k=1mkr2k – осевой момент инерции тела см.лаб.раб.№6.
Скорость изменения момента импульса LO механической системы относительно центра О равна сумме моментов всех внешних сил →Fek, действующих на точки и тела этой системы, т. е.
Формула 8.3
Если сумма моментов всех внешних сил равна нулю во время движения, то вектор LO не изменяется во времени, т. е. LO = const (закон сохранения момента импульса LO). В частном случае, если сумма моментов всех внешних сил относительно оси Oz все время равна нулю, то момент импульса системы относительно этой оси не изменяется, т. е. Lz = const (закон сохранения проекции вектора LO).
Крутильный баллистический маятник рис.8.2 выполнен в виде крестовины, подвешенной на проволочном тросе 11 к кронштейну 10. Для устранения маятниковых боковых колебаний к крестовине с помощью троса 11' крепится тяжелый груз 9. Покрытая слоем пластилина мишень 5 укреплена на правом конце горизонтальной штанги, по которой могут перемещаться три цилиндрических груза 5, 6, 7. Меньший из них 6 служит для уравновешивания мишени, а два одинаковых цилиндрических груза 7 и 8 служат для изменения момента инерции маятника. Для определения угла поворота φ маятника используется лазер 12, прикрепленный к оси крестовины. Угол φ определяется по смещению S светового зайчика 13 по круговой шкале радиуса R нарис.8.2онанепоказана, т. е. φ = S / R.
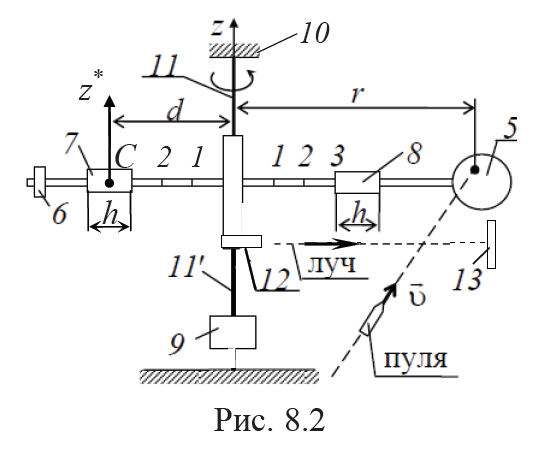
После выстрела пуля массой m, летящая со скоростью υ, попадает в мишень и застревает в ней, создавая в пластилине углубление, на расстоянии r от оси вращения. Рассмотрим движение системы, состоящей из маятника и пули. Моменты всех внешних сил силтяжести,силреакцииопор, действующих во время удара на систему, относительно оси вращения z равны нулю (почему это так, разберитесь самостоятельно, изобразив все внешние силы на рис. 8.2). Поэтому применяем закон сохранения проекции момента импульса относительно этой оси (L1z = L2z, где L1z = mυr – момент импульса пули до попадания ее в мишень маятника; L2z = (Iz + mr2)ω – момент импульса системы после попадания пули), т. е.
Формула 8.4
где Iz и mr2 – моменты инерциии маятника и пули относительно оси вращения соответственно; ω – угловая скорость вращения системы маятник – пуля сразу после соударения.
Начальная кинетическая энергия вращающегося маятника с застрявшей после удара пулей (Квр = (Iz + mr2)ω2 / 2) постепенно превращается в энергию упругой деформации кручения двух одинаковых проволок подвески, так что в момент остановки маятника в крайнем положении потенциальная энергия П=2fϕ2М/2 (f – модуль кручения проволоки; φм – максимальный угол поворота маятника).
В соответствии с законом сохранения энергии еслипренебречьсопротивлениемвоздуха получим

Формула 8.5
Исключая из уравнений 8.4 и 8.5 неизвестную угловую скорость ω и учитывая, что φ = S / R, получим расчетную формулу для косвенного измерения скорости υ пули (сделайте это самостоятельно):
Формула 8.6
Используя свойство аддитивности и теорему Штейнера, находим момент инерции Iz маятника:

Формула 8.7
где Ікр – момент инерции крестовины с мишенью 5 и противовесом 6; Iцил=IцилCz∗+Md2 – момент инерции цилиндрических грузов 7, 8 относительно оси вращения маятника.
Параметры установки. Модуль кручения проволоки f = 4,5 · 10–2 Н·м. Момент инерции крестовины с мишенью и противовесом Ікр = 0,18 кг·м2. Масса М, высота h и радиус Rцил подвижных цилиндров: М = 1,82 кг; h = 8 см; Rцил = 3 см.
Расстояния d от оси вращения маятника до центра тяжести С подвижных цилиндрических грузов при совмещении их ближайших к оси z оснований с метками на горизонтальной штанге крестовины, см: для первой метки d1 = 8,5; для второй – d2 = 9,5; для третьей – d3 = 10,5; для четвертой – d4 = 11,5 для пятой – d5 = 12,5; для шестой – d6= 13,5; для седьмой – d7 = 14,5; для восьмой – d8 = 15,5. Массы m пуль указаны на крышке коробки с пулями номерпулисоответствуетчислукруговыхметок,нанесенныхнаповерхностиэтойпули.
1. Результаты измерений и расчетов, а также единицы измерения величин занесите в таблицу.

2. Измерьте расстояние R от оси вращения z до круговой шкалы.
3. В комплекте к работе возьмите пулю, число меток выточек на которой совпадает с номером Вашего звена в подгруппе, и занесите ее массу в таблицу.
4. Расположите цилиндрические грузы 7 и 8 симметрично, так, чтобы они своими ближайшими к оси основаниями были совмещены с меткой, номер которой в направлении от оси совпадает с номером группы в потоке, и определите расстояние d. Включите вилку шнура источника света лазера в розетку сети.
5. Произведите 6 выстрелов, каждый раз измеряя максимальное смещение S светового зайчика равноеамплитудепоследующихколебаниймаятника и расстояние r от оси вращения до точки попадания пули в мишень. Отключите установку от сети.
6. Вычислите момент инерции маятника по формуле 8.7, а по формуле 8.6 для каждого опыта выстрела рассчитайте скорость пули υi и найдите ее среднюю скорость υсред.
7. Определите случайную абсолютную Δυ и относительную ευ погрешности серии измерений скорости пули по методике прямых измерений (при доверительной вероятности p = 0,95).
8. Подготовьте выводы по выполненной лабораторной работе.